点击上方蓝字关注我们!
背景
以图搜图,是日常生活中我们经常会用到,例如在选购一款商品时,想要对比价格,往往会在各个购物app上通过搜图的形式来看同一款产品的价格;当你碰到某种不认识的植物时,也可以通过以图搜图的方式来获取该种植物的名称。而这些功能大都是通过计算图像的相似度来实现的。通过计算待搜索图片与图片数据库中图片之间的相似度,并对相似度进行排序为用户推荐相似图像的搜索结果。同时,通过检测图片是否相似也可用于判断商标是否侵权,图像作品是否抄袭等。本文将介绍几种比较常用的相似图像检测方法,其中包括了基于哈希算法,基于直方图,基于特征匹配,基于BOW+Kmeans以及基于卷积网络的图像相似度计算方法。
技术实现
![]()
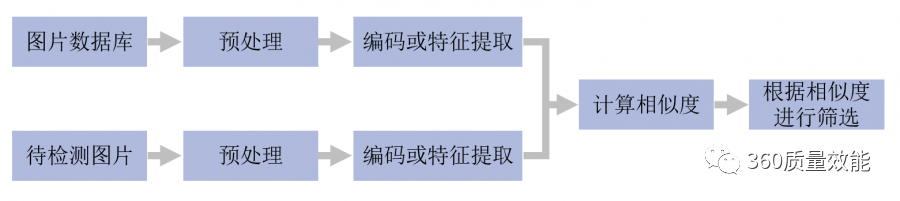
相似图像的检测过程简单说来就是对图片数据库的每张图片进行编码或抽取特征(一般形式为特征向量),形成数字数据库。对于待检测图片,进行与图片数据库中同样方式的编码或特征提取,然后计算该编码或该特征向量和数据库中图像的编码或向量的距离,作为图像之间的相似度,并对相似度进行排序,将相似度靠前或符合需求的图像显示出来。
哈希算法
哈希算法可对每张图像生成一个“指纹”(fingerprint)字符串,然后比较不同图像的指纹。结果越接近,就说明图像越相似。
常用的哈希算法有三种:
def aHash(img):
img = cv2.resize(img, (8, 8))
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
np_mean = np.mean(gray)
ahash_01 = (gray > np_mean) + 0
ahash_list = ahash_01.reshape(1, -1)[0].tolist()
ahash_str = ''.join([str(x) for x in ahash_list])
return ahash_str
def pHash(img):
img = cv2.resize(img, (32, 32))
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
dct = cv2.dct(np.float32(gray))
dct_roi = dct[0:8, 0:8]
avreage = np.mean(dct_roi)
phash_01 = (dct_roi > avreage) + 0
phash_list = phash_01.reshape(1, -1)[0].tolist()
phash_str = ''.join([str(x) for x in phash_list])
return phash_str
def dHash(img):
img = cv2.resize(img, (9, 8))
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
hash_str0 = []
for i in range(8):
hash_str0.append(gray[:, i] > gray[:, i + 1])
hash_str1 = np.array(hash_str0) + 0
hash_str2 = hash_str1.T
hash_str3 = hash_str2.reshape(1, -1)[0].tolist()
dhash_str = ''.join([str(x) for x in hash_str3])
return dhash_str
def hammingDist(hashstr1, hashstr2):
assert len(hashstr1) == len(hashstr1)
return sum([ch1 != ch2 for ch1, ch2 in zip(hashstr1, hashstr1)])
单通道直方图和三直方图
def calculate_single(img1, img2):
hist1 = cv2.calcHist([img1], [0], None, [256], [0.0, 255.0])
hist1 = cv2.normalize(hist1, hist1, 0, 1, cv2.NORM_MINMAX, -1)
hist2 = cv2.calcHist([img2], [0], None, [256], [0.0, 255.0])
hist2 = cv2.normalize(hist2, hist2, 0, 1, cv2.NORM_MINMAX, -1)
degree = 0
for i in range(len(hist1)):
if hist1[i] != hist2[i]:
degree = degree + (1 - abs(hist1[i] - hist2[i]) / max(hist1[i], hist2[i]))
else:
degree = degree + 1
degree = degree / len(hist1)
return degree
def classify_hist_of_three(img1, img2, size=(256, 256)):
image1 = cv2.resize(img1, size)
image2 = cv2.resize(img2, size)
sub_image1 = cv2.split(img1)
sub_image2 = cv2.split(img2)
sub_data = 0
for im1, im2 in zip(sub_img1, sub_img2):
sub_data += calculate_single(im1, im2)
sub_data = sub_data / 3
return sub_data
基于特征提取与匹配的方法
def ORB_img_similarity(img1_path,img2_path):
orb = cv2.ORB_create()
img1 = cv2.imread(img1_path, cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread(img2_path, cv2.IMREAD_GRAYSCALE)
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
bf = cv2.BFMatcher(cv2.NORM_HAMMING)
matches = bf.knnMatch(des1, trainDescriptors=des2, k=2)
matchNum = [m for (m, n) in matches if m.distance <0.8* n.distance]
similary = len(good) / len(matches)
return similary
def sift_similarity(img1_path, img2_path):
sift = cv2.xfeatures2d.SIFT_create()
FLANN_INDEX_KDTREE=0
indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
searchParams = dict(checks=50)
flann = cv2.FlannBasedMatcher(indexParams, searchParams)
sampleImage = cv2.imread(samplePath, 0)
kp1, des1 = sift.detectAndCompute(sampleImage, None)
kp2, des2 = sift.detectAndCompute(queryImage, None)
matches = flann.knnMatch(des1, des2, k=2)
matchNum = [m for (m, n) in matches if m.distance <0.8* n.distance]
similary = matchNum/len(matches)
return similarity
基于BOW+K-Means的相似图像检测
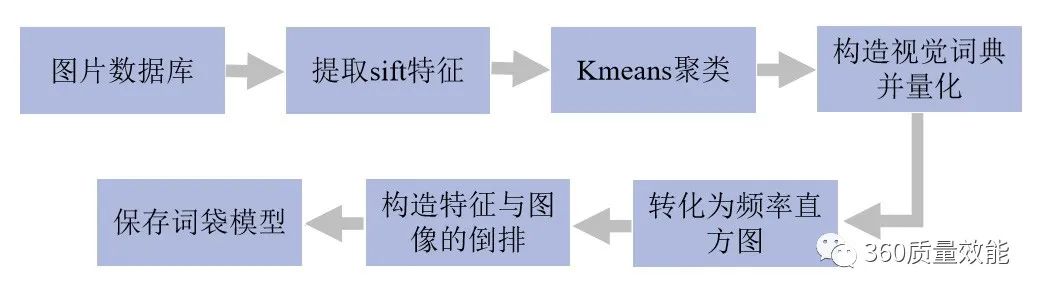
BOW模型被广泛用于计算机视觉中,相比于文本的BOW,图像的特征被视为单词(word),视觉词汇的字典则由图片集中的所有视觉词汇构成,词袋模型的生成如下图。首先,用sift算法生成图像库中每幅图的特征点及描述符。再用k-Means算法对图像库中的特征点进行聚类,聚类中心有k个,聚类中心被称为视觉词汇,将这些聚类中心组合在一起,形成一部字典。根据IDF原理,计算每个视觉单词TF-IDF权重来表示视觉单词对区分图像的重要程度。对于图像库中的每一幅图像,统计字典中每个单词在在其特征集中出现的次数,将每张图像表示为K 维数值向量(直方图)。得到每幅图的直方图向量后,构造特征到图像的倒排表,通过倒排表快速索引相关候选的图像。对于待检测的图像,计算出sift特征,并根据TF-IDF转化成特征向量(频率直方图),根据索引结果进行直方图向量的相似性判断。
des_list = []
filelist = os.listdir(dir)
trainNum = int(count / 3)
for i in range(len(filelist)):
filename = dir + '\\' + filelist[i]
img = cv2.imread(filename)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
kp, des = sift_det.detectAndCompute(gray, None)
des_list.append((image_path, des))
descriptors = des_list[0][1]
for image_path, descriptor in des_list[1:]:
descriptors = np.vstack((descriptors, descriptor))
voc, variance = kmeans(descriptors, numWords, 1)
im_features = np.zeros((len(image_paths), numWords), "float32")
for i in range(len(image_paths)):
words, distance = vq(des_list[i][1], voc)
for w in words:
im_features[i][w] += 1
nbr_occurences = np.sum((im_features >0) * 1, axis = 0)
idf = np.array(np.log((1.0*len(image_paths)+1) / (1.0*nbr_occurences + 1)), 'float32')
im_features = im_features*idf
im_features = preprocessing.normalize(im_features, norm='l2')
joblib.dump((im_features, image_paths, idf, numWords, voc), "bow.pkl", compress=3)
基于卷积网络的相似图像检测
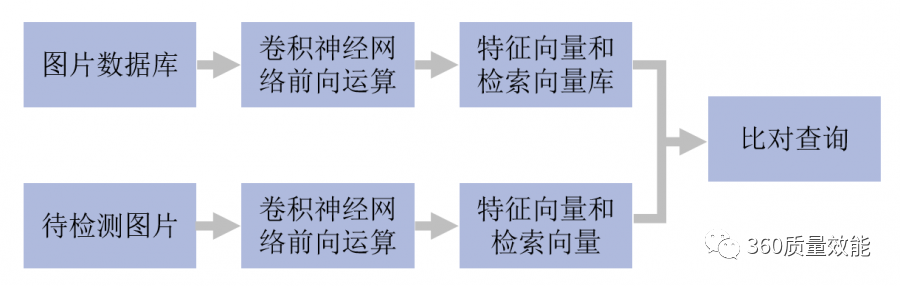
在ImageNet中的卷积网络结构(vgg16)基础上,在第7层(4096个神经元)和output层之间多加一个全连接层,并选用sigmoid激活函数使得输出值在0-1之间,设定阈值0.5之后可以转成01二值向量作为二值检索向量。这样,对所有的图片做卷积网络前向运算,得到第7层4096维特征向量和代表图像类别分桶的第8层output。对于待检测的图片,同样得到4096维特征向量和128维01二值检索向量,在数据库中查找二值检索向量对应的图片,比对4096维特征向量之间距离,重新排序即得到最终结果。其流程如下:
database = 'dataset'
index = 'models/vgg_featureCNN.h5'
img_list = get_imlist(database)
features = []
names = []
model = VGGNet()
for i, img_path in enumerate(img_list):
norm_feat = model.vgg_extract_feat(img_path)
img_name = os.path.split(img_path)[1]
features.append(norm_feat)
names.append(img_name)
feats = np.array(features)
output = index
h5f = h5py.File(output, 'w')
h5f.create_dataset('dataset_features', data=feats)
h5f.create_dataset('dataset_names', data=np.string_(names))
h5f.close()
model = VGGNet()
queryVec = model.vgg_extract_feat(imgs)
scores = np.dot(queryVec, feats.T)
rank_ID = np.argsort(scores)[::-1]
rank_score = scores[rank_ID]
效果展示
![]()
下边展示了不同方法针对一张图标,在同一数据库中进行相似图像检测的效果:

从检测结果中可以看出,针对上述的数据,基于vgg16和sift特征的检索结果会更加的准确和稳定,基于直方图检索出的图与待检测的图也都比较相似,而基于BOW和哈希算法检索出的结果表现则不稳定,基于orb特征检索出来的图和待检测图差距很大,效果很不理想。但这不能说明某种方法一定不好,而是针对特定数据而言的,同种方法在不同数据库中的表现也存在着差异。在实践过程中,为了保证检测效果的稳定性,应选取性能较好较稳的方法。
总结
![]()
相似图片的检测方法有很多,但不是每种方法都适应于你的应用场景,各种方法在不同的数据上的表现也具有很大的差异。因此,可以根据自身数据的特点和不同方法的特性来综合考虑。也可以根据需求将不同的方法进行结合,进一步提升相似图像检测的准确性和稳定性。如果检测相似图片是为了分析商标是否侵权或是作品是否抄袭等,可适当的设置相似度的阈值,进行筛选。
